Homepage › Solution manuals › Dimitris Bertsimas › Introduction to Linear Optimization › Exercise 2.10
Exercise 2.10
Consider the standard form polyhedron . Suppose that the matrix has dimensions and that its rows are linearly independent. For each of the following statements, state whether it is true of false. If true, provide a proof, else, provide a counterexample.
- (a)
- If , then has at most two basic feasible solutions.
- (b)
- The set of all optimal solutions is bounded.
- (c)
- At every optimal solution, no more than m variables can be positive.
- (d)
- If there is more than one optimal solution, then there are uncountably many optimal solutions.
- (e)
- If there are several optimal solutions, then there exist at least two basic feasible solutions that are optimal.
- (f)
- Consider the problem of minimizing over the set . If this problem has an optimal solution, it must have an optimal solution which is an extreme point of .
Answers
(a) This assertion is true. The geometric intuition behind this assertion is that is a polyhedron in that is contained in a subset of the intersection of hyperplanes
Recall that an intersection of (linearly independent) hyperplanes in an dimensional space always results in a line. As a convex subset of this line, polyhedron must either be a line itself, or a ray, or a line segment. In any of these cases, the resulting figure has at most two extreme points. We now formalize this argument.
Proof. We first demonstrate that is a convex subset of some line. Since has , by rank-nullity theorem we conclude that the null space of is a one-dimensional vector subspace of , i.e., a line. But then the null space of the affine mapping must be a line as well. To see why, let be a vertex of . Then,
[If ,
then
for .]
Now we demonstrate that a convex subset of a line can have at most
extreme points. Suppose for the sake of contradiction that we can find three
distinct extreme points
of .
By definition of a line, there exist scalars
and a vector
such that .
Since they all reside on the line, one of them must be between the two others;
without loss of generality, assume that
and as such
Since is between the two other solutions and is convex, we can write as a convex combination of and :
Hence, cannot be an extreme point - a contradiction. □

Comments
(a) True. In fact is a polyhedron in that is contained in the intersection of hyperplanes. Since the rows of are linearly independent we get that is contained in a subspace of dimension , therefore a line. Hence has at most two extreme points, equivalently has at most two basic feasible solutions.
(b) False. Consider the polyhedron . Here and .
Suppose we are minimizing , with . Then every point of is an optimal solution. Since is unbounded, also the set of optimal solutions is unbounded.
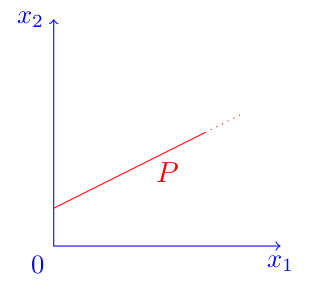
(c) False. Consider the following example where . Then and . The polyhedron is the red segment displayed below.
Assume that the objective function to minimize is where In this case and every point in is an optimal solution. For example isan optimal solution with more than positive variables.
(d) True. In fact, if we have two optimal solutions, every convex combination of
those is an optimal solution too.
Proof. Suppose we want to minimize and let be two optimal solutions. It means that
where is the optimal objective value and for all . Let and consider . We want to show that is an optimal solution too. We have that
therefore is an optimal solution. □
(e) False. The same counterexample of point (b) holds, in fact, there is only one basic feasible solution which is . It is optimal because coincide with the set of optimal solutions.
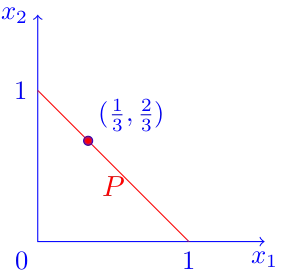
(f) False. Let ,
let
and .
So in this example we are minimizing on
the
. The polyhedron
is the segment
joining the points
in red. The teal line represents the line in which
. In fact above
it we have and
therefore ,
below it
and .
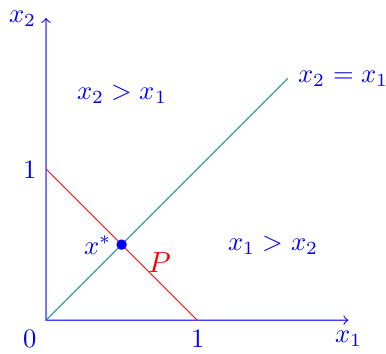
Hence is achieved by .

Comments
(a) No, it is not true. Consider the standard form polyhedron There are 3 basic solutions .
(b) No, it is not true. Consider the LP problem that minimize over the standard form polyhedron . Then every point in the polyhedron is an optimal solution, and clearly, the polyhedron is not bounded.
(c) No, it is not true. Consider again the LP problem in (b). Then is an optimal solution with more than 1 positive variables.
(d) Yes, it is true. Let be two distinct optimal solutions and be the corresponding optimal value. Consider the convex combination of . For all . Also, since the polyhedron is a convex set, every convex combination of is in the polyhedron. Thus, we have uncountably many optimal solutions .
(e) No, it is not true. Consider again the counterexample in (b). The polyhedron has only one basic feasible solution but infinitely many optimal solutions.
(f) Yes, it is true. Introduce new variables with constraints , and Then we transform the LP problem into minimizing over a standard form polyhedron where Note that there are variables and equality constraints. Let be the by matrix of all equality constraints of . Since the matrix has linearly independent rows and the new constraints involve new variables respectively, the matrix also has linearly independent rows. The LP problem has an optimal solution, so there is an extreme point of that is an optimal solution. We now claim is an optimal solution which is an extreme point of Obviously, Note that , so we can choose at most 2 linearly independent columns from when constructing a basic solution. That said, we have to choose at least columns from the first columns of . However, we can choose at most linearly independent columns from the first columns because . Therefore, every extreme point of has a corresponding basis consisting vectors from the first columns of This means has a corresponding basis consisting exactly vectors from the columns of . Thus, is an extreme point of and clearly it is also an optimal solution to the LP problem.

Comments
-
For question (a), $(0,2,-1)$ is not a feasible solution, as $z$ should be bigger than 0.johndst • 2023-10-02